HeliCam



After my experience covering the collapse of the Cypress Freeway during the Loma Prieta Earthquake, I began thinking of ways that would make searching extremely dangerous locations possible using technology. My first attempt was HAZCAM. That led me to this early prototype of a remotely-piloted aircraft with a video camera aboard. This is my first design.
I really wanted a nice picture of my helicopter, but I had no one to help. Believe it or not, I took this picture while hovering the ship. I mounted my camera on a tripod, and used a remote shutter release that had a squeeze bulb to take the shot. I moved my machine into position and stepped on the bulb with my foot. Not a bad picture, if I do say so myself!
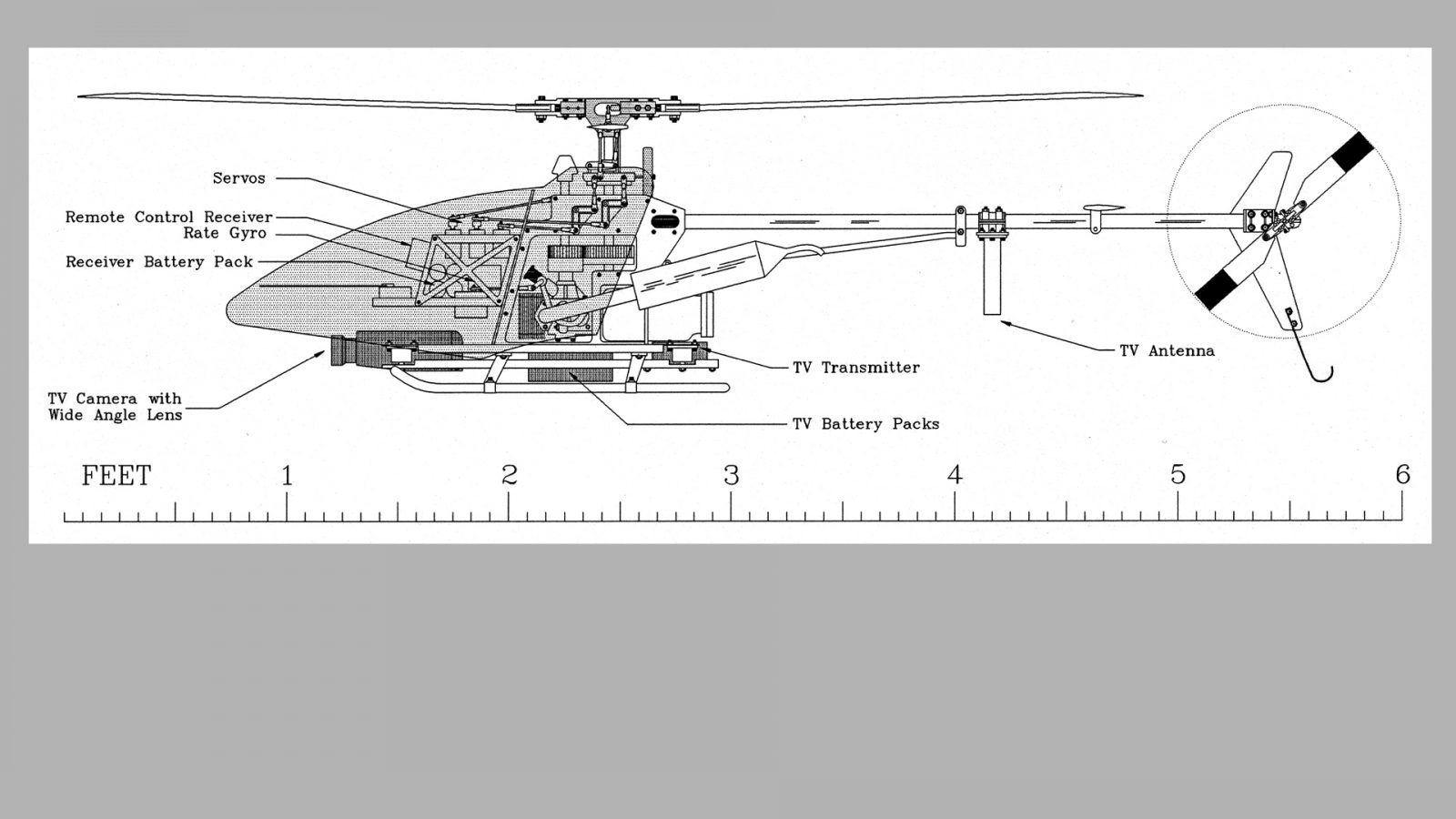
This is my first functional camera-equipped remotely-piloted vehicle. As shown in the previous slide, it was equipped with a color video camera, microwave downlink transmitter, omnidirectional antenna, and battery pack. The entire electronics package was mounted on a vibration-isolated tray suspended below the helicopter's frame. I captured vibration data while hovering with the use of an accelerometer. Tuning the suspension elastomeric isolators for minimum vibration ws a challenge.
I improved my first design by separating the optical sensor from the camera electronics and installing it on a custom tilt/pan mount. I installed a completely separate radio control system to control the camera, so it took two operators - one to fly the helicopter and one to operate the camera.
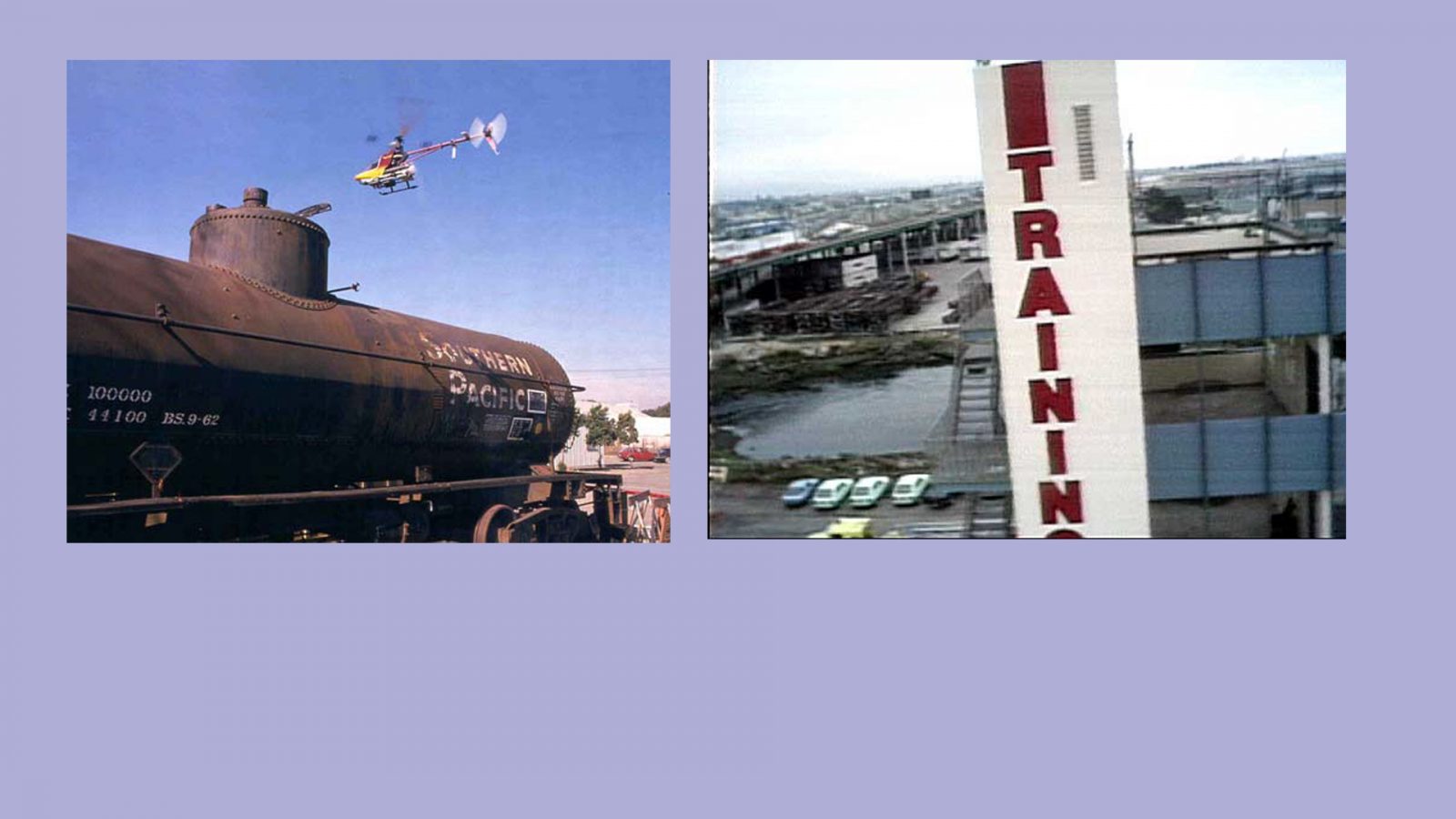
I worked with the Oakland Fire Department at their training center and received great feedback. Unfortunately, I was in no position to take high-quality pictures since I was flying the helicopter. The same Hazcam receiving equipment was used for the helicopter. The picture on the right was grabbed off the small video monitor as I was hovering near the top of their training tower.
My final version of the Helicam helicopter worked very well, but it was too far ahead of the time and it was impractical - It took skill and practice to fly the helicopter, duration was limited, it was noisey, and a second camera operator was required. Attempting to operate it under stress during an emergency would have been a challenge. It was also dangerous. The main rotor was turning at several thousand RPM and was hard to see in flight.
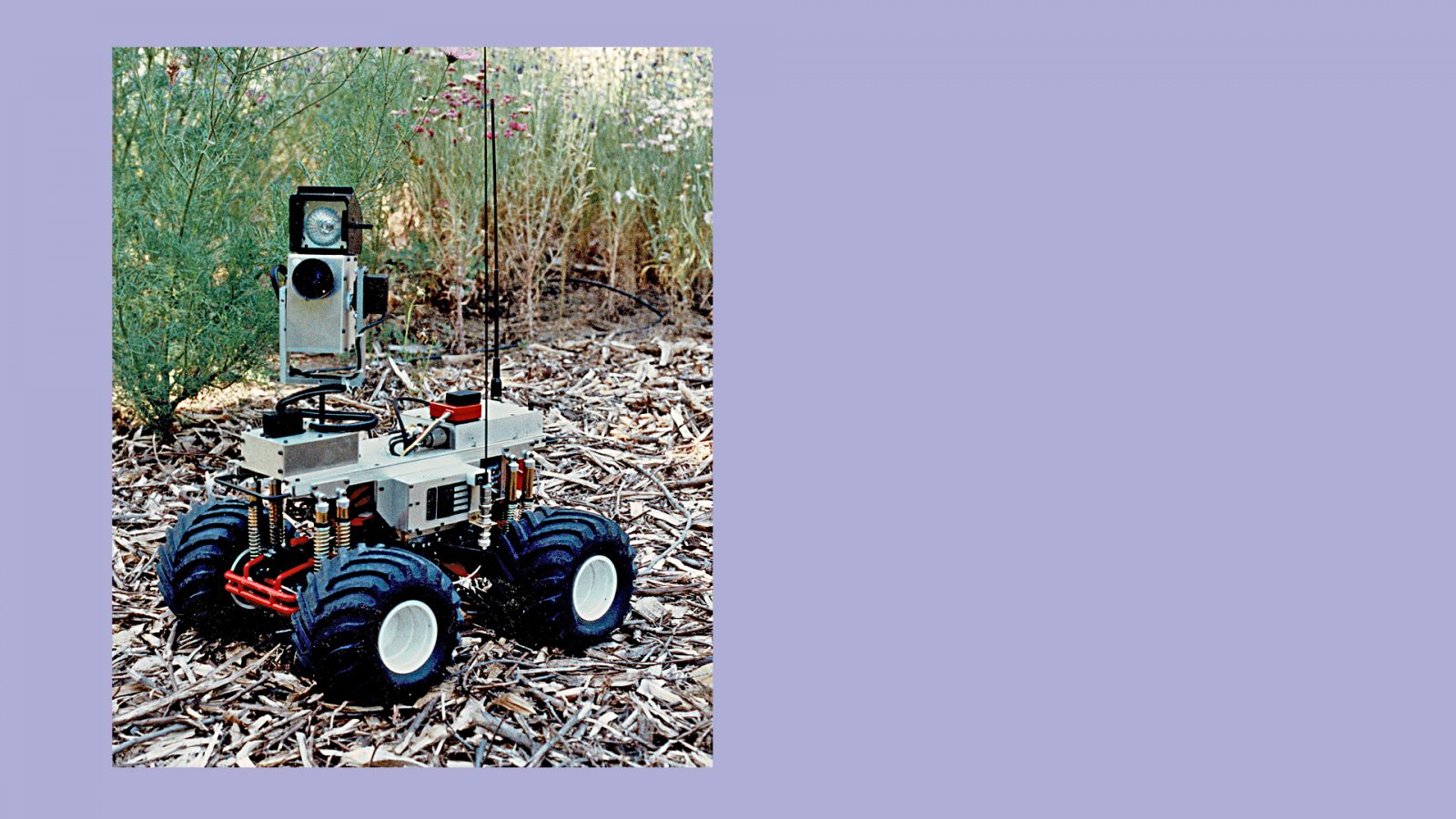
This project did prove to me that the video system was effective. It just needed a different platform... That led to my final land-based design. I simply ported the video camera with the tilt/pan head and the microwave transmitter and mounted it on a stock hobbyist four wheel drive electric vehicle. It overcame all the previous limitations; the video transmission system had a 4-hour endurance, the little truck could be parked once it was sent to a good location and remain for at least a day, it was very easy to operate by one person, and it required very little skill.
I could drive this little buggy around my yard, out the driveway, and around the block - all while using the video image to guide it. Using the tilt/pan head I could drive behind a parked vehicle and easily read the little sticker on the corner of the license plate, or look underneath for explosives'. It could also be used to surveil a dangerous location and persist for hours. There was only one problem. It looked like a toy and no law enforcement or fire department would be caught using it. Working a full time job it was not possible for me to push this project any farther. Too bad...